Hello! My name is Muhammad Rafey Tahir, and I am currently pursuing the Erasmus Mundus Joint Master’s in Electrical Vehicle Propulsion and Control (E-PiCo+) , with my first semester at Centrale Nantes, France. I hold a Master’s degree in Electrical Engineering (specializing in Control Systems) from the School of Electrical Engineering and Computer Science (SEECS) at the National University of Sciences and Technology (NUST), Pakistan, where I conducted research under the supervision of Prof. Usman Ali . With a solid foundation in Electrical Engineering from my undergraduate studies, I’ve channeled my passion for technology into the realm of control theory and robotics — fields I believe hold the keys to monumental advancements in improving human life.
My research journey began during my undergraduate studies at Muhammad Nawaz Sharif University of Engineering and Technology (MNS-UET), Pakistan. Where my final year project was the design of a Smart Bionic Prosthetic Leg for amputees, solidified my interest in applying technological solutions to real-world problems. This fully research-based project focused on developing a safe embedded system for controlling the prosthetic leg, with a particular emphasis on affordability to serve underprivileged communities.
My research interests lie at the intersection of robotics, reinforcement learning and control. More specifically, aiming to enhance the agility, efficiency and robustness of robotic and autonomous systems, I develop novel methods that unify perception, planning and control in a transparent and understandable manner.
If you find my work appealing or would like to connect, please get in touch. I am always looking for new collaborations.
I hold a Master's degree in Electrical Engineering with specialization in Control Systems from National University of Sciences and Technology (Pakistan). I'm currently pursuing my 2nd Master's with the Erasmus Mundus international Joint Master program E-PiCo+ from Centrale Nantes, France.
I am actively seeking (academic/phd/industry) job opportunities !
PROJECTS
.gif)
Development of 6+ DOF robot manipulator
Design and implementation of inverse kinematics algorithms for trajectory optimization and path planning, enhancing robotic precision and efficiency in dynamic environments.
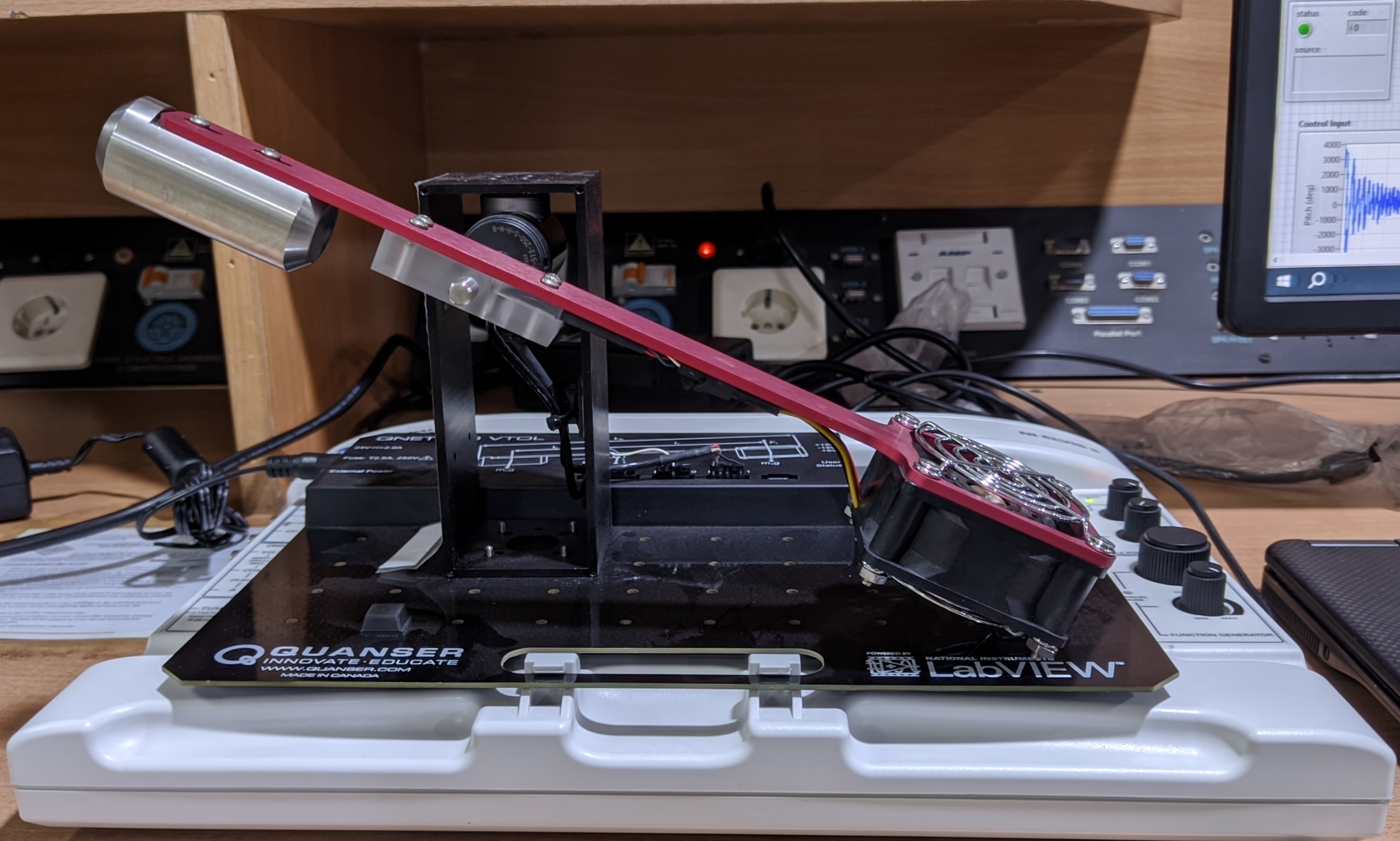
Model-free Control of Vertical Take-off and Landing Systems
This aims to produce periodic maneuvers on VTOL using a model free controller.
Intelligent Estimation of Battery State-of-Charge and Health(SOC-SOH)
Deep Learning–Based SOC and SOH Estimation for Lithium-Ion Batteries with Embedded Deployment Considerations
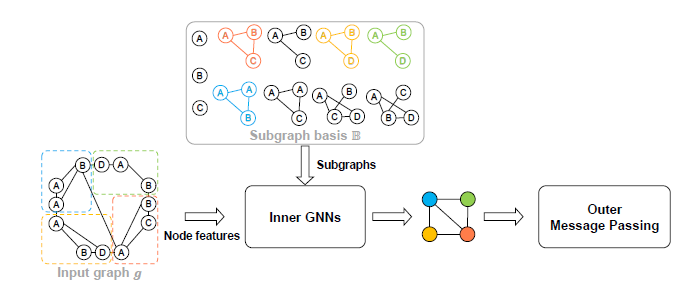
Automatic Circuit Generation using Reinforcement Learning
Analog circuit automation using graph neural networks and reinforcement learning.
Periodic Trajectory Generation using 6-degree Polynomial Function
This code aims to generate periodic reference trajectories for robot manipulators which can be used to generate stable limit cycles

Rotary Inverted Pendulum Control
This Projects aims to control rotary inverted pendulum using model free robust adaptive controller.
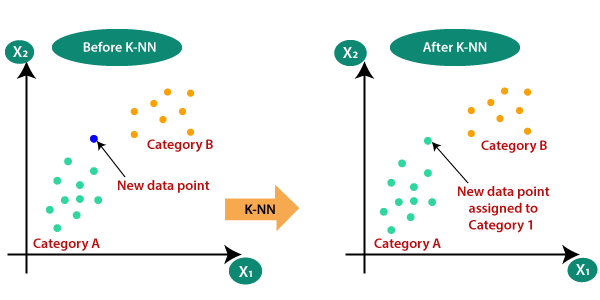
Classification from Scratch
This project implements 4 different algorithms, K-Nearest Neighbors (KNN), Decision Tree, Support Vector Machine (SVM) and Logistic Regression.
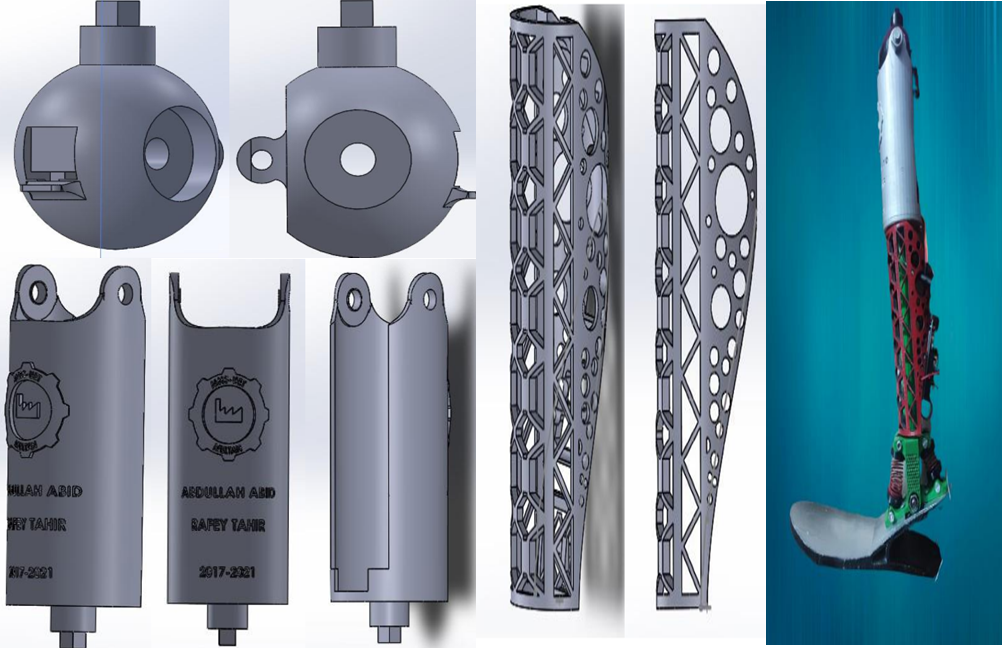
Smart Bionic Prosthetic Leg
M. Rafey Tahir, Abdullah
Bachelors Thesis, 2021
TEACHING

During my masters and undergrad studies I have had the privilege to work as a teaching assistant for following courses:
- MATH-816: Applied Linear Algebra 1: Introductory theoretical course offered throughout multiple semesters.
- Fall 23, NUST, MS. Electrical Engineering, Enrolled students: 50
- CSC-341: Introduction to Computing: Offered as an introductory course in BSc.Electrical Engineering at MNS-UET.
- EEE-562: Linear Control Systems: Offered as a core course in BSc.Electrical Engineering at MNS-UET.
- Erasmus Mundus Scholarship for Joint Master Degree on electric vehicle propulsion and control.
- Dean’s Honour Roll - Fall 2019, Spring 2020, Fall 2020, Spring 2021.
- PepsiCo Foundation ExCEL Awards Program
- Recipient of Prime Minister’s Youth Laptop Scheme Phase-III
CONTACT ME
If you are interested in reaching out, please send me an email. In case you want to receive the latest updates on my research, follow me on social media!